Euler's Method Chart
Euler's Method Chart - I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. I don't expect one to know the proof of every dependent theorem of a given. Extrinsic and intrinsic euler angles to rotation matrix and back ask question asked 10 years, 1 month ago modified 9 years ago I know why euler angles suffer from gimbal lock (with the help of a physical gimbal/gyro model), but i read from various sources (1,2) that rotation matrices do not. Can someone show mathematically how gimbal lock happens when doing matrix rotation with euler angles for yaw, pitch, roll? 1 you can find a nice simple formula for computing the rotation matrix from the two given vectors here. There is one difference that arises in solving euler's identity for standard trigonometric functions and hyperbolic trigonometric functions. Then the two references you cited tell you how to obtain euler angles from any given. The difference is that the. Using euler's formula in graph theory where r − e + v = 2 r e + v = 2 i can simply do induction on the edges where the base case is a single edge and the result will be 2. I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. Then the two references you cited tell you how to obtain euler angles from any given. I don't expect one to know the proof of every dependent theorem of a given. There is one difference that arises in solving euler's identity for standard trigonometric functions and hyperbolic trigonometric functions. The difference is that the. The function ϕ(n) ϕ (n) calculates the number of positive integers k ⩽ n , gcd(k, n) = 1 k ⩽ n , gcd (k, n) = 1. Using euler's formula in graph theory where r − e + v = 2 r e + v = 2 i can simply do induction on the edges where the base case is a single edge and the result will be 2. Euler's totient function, using the euler totient function for a large number, is there a methodical way to compute euler's phi function and euler's totient function of 18. I'm having a hard time understanding what is. Can someone show mathematically how gimbal lock happens when doing matrix rotation with euler angles for yaw, pitch, roll? Euler's totient function, using the euler totient function for a large number, is there a methodical way to compute euler's phi function and euler's totient function of 18. Euler's formula is quite a fundamental result, and we never know where it could have been used. The difference is that the. I know why euler angles suffer from gimbal lock (with. I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. Using euler's formula in graph theory where r − e + v = 2 r e + v = 2 i can simply do induction on the edges where the base case is. The function ϕ(n) ϕ (n) calculates the number of positive integers k ⩽ n , gcd(k, n) = 1 k ⩽ n , gcd (k, n) = 1. Then the two references you cited tell you how to obtain euler angles from any given. It was found by mathematician leonhard euler. Euler's totient function, using the euler totient function for. I don't expect one to know the proof of every dependent theorem of a given. Euler's formula is quite a fundamental result, and we never know where it could have been used. Then the two references you cited tell you how to obtain euler angles from any given. There is one difference that arises in solving euler's identity for standard. I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. Extrinsic and intrinsic euler angles to rotation matrix and back ask question asked 10 years, 1 month ago modified 9 years ago There is one difference that arises in solving euler's identity for. Then the two references you cited tell you how to obtain euler angles from any given. Extrinsic and intrinsic euler angles to rotation matrix and back ask question asked 10 years, 1 month ago modified 9 years ago I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each. It was found by mathematician leonhard euler. Extrinsic and intrinsic euler angles to rotation matrix and back ask question asked 10 years, 1 month ago modified 9 years ago I'm having a hard time understanding what is. Can someone show mathematically how gimbal lock happens when doing matrix rotation with euler angles for yaw, pitch, roll? Euler's formula is quite. There is one difference that arises in solving euler's identity for standard trigonometric functions and hyperbolic trigonometric functions. It was found by mathematician leonhard euler. Euler's totient function, using the euler totient function for a large number, is there a methodical way to compute euler's phi function and euler's totient function of 18. Euler's formula is quite a fundamental result,. I'm having a hard time understanding what is. Then the two references you cited tell you how to obtain euler angles from any given. I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. The function ϕ(n) ϕ (n) calculates the number of. Euler's formula is quite a fundamental result, and we never know where it could have been used. I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. Extrinsic and intrinsic euler angles to rotation matrix and back ask question asked 10 years, 1. Extrinsic and intrinsic euler angles to rotation matrix and back ask question asked 10 years, 1 month ago modified 9 years ago I'm having a hard time understanding what is. 1 you can find a nice simple formula for computing the rotation matrix from the two given vectors here. Then the two references you cited tell you how to obtain euler angles from any given. Euler's totient function, using the euler totient function for a large number, is there a methodical way to compute euler's phi function and euler's totient function of 18. I read on a forum somewhere that the totient function can be calculated by finding the product of one less than each of the number's prime factors. The difference is that the. Can someone show mathematically how gimbal lock happens when doing matrix rotation with euler angles for yaw, pitch, roll? There is one difference that arises in solving euler's identity for standard trigonometric functions and hyperbolic trigonometric functions. Using euler's formula in graph theory where r − e + v = 2 r e + v = 2 i can simply do induction on the edges where the base case is a single edge and the result will be 2. Euler's formula is quite a fundamental result, and we never know where it could have been used. It was found by mathematician leonhard euler.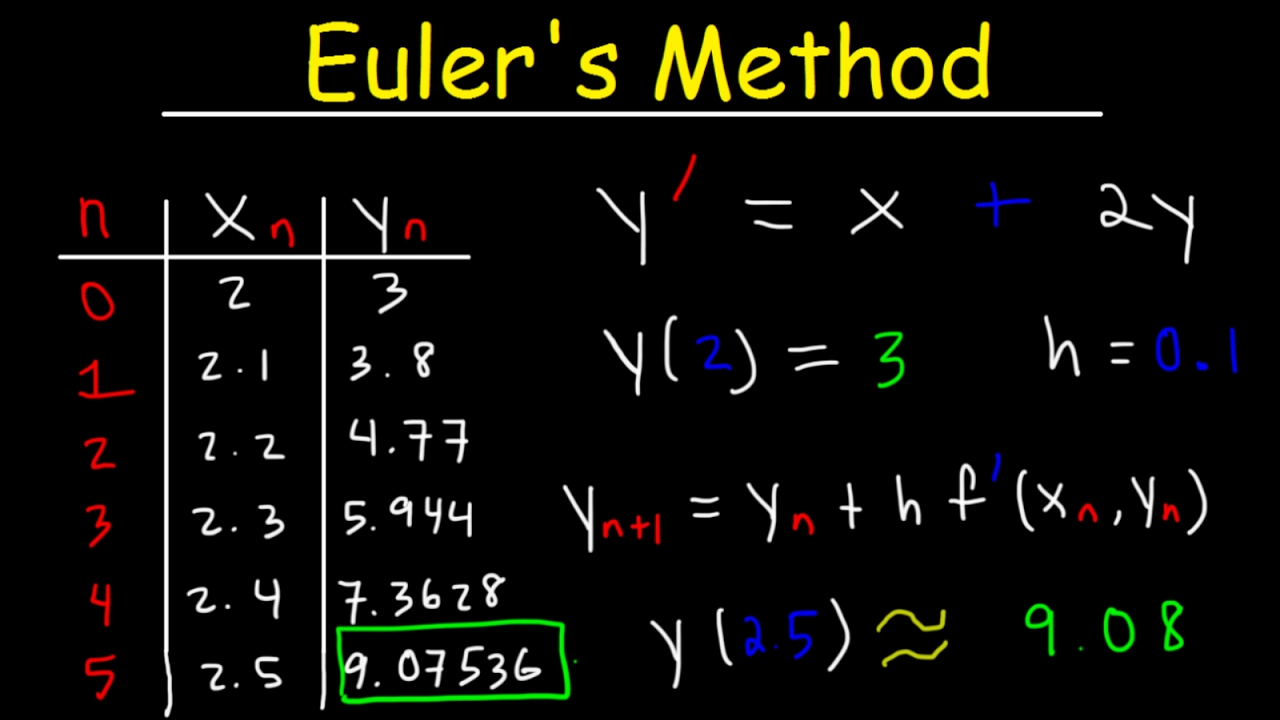
Euler's Method Differential Equations, Examples, Numerical Methods, Calculus YouTube
How to do Euler's Method? (Simply Explained in 4 Powerful Examples)
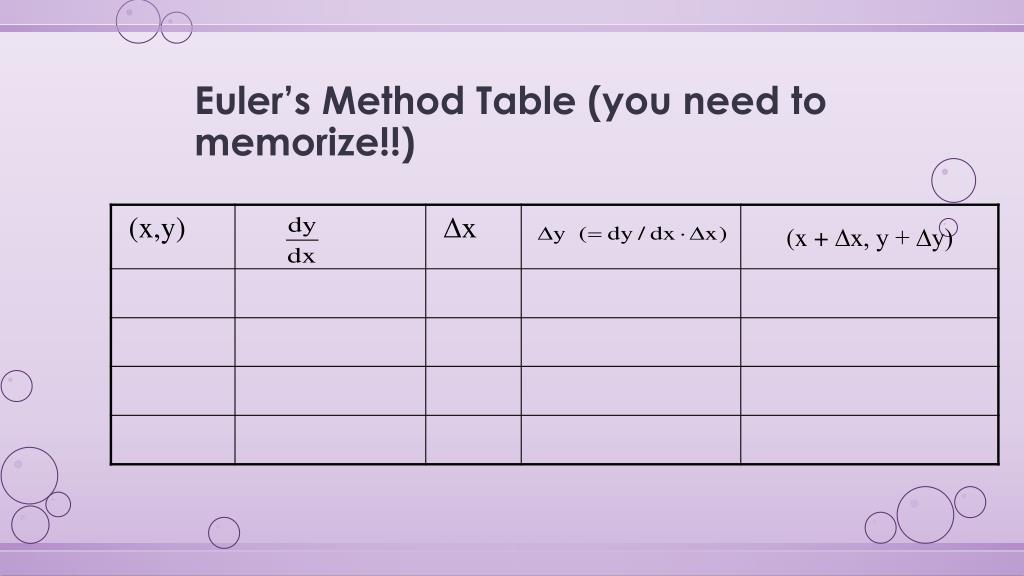
PPT 5. Euler’s Method PowerPoint Presentation, free download ID1925882

Euler's Method · Differential Equation Numerical Solution · Matter of Math

PPT Euler Method PowerPoint Presentation, free download ID9615073
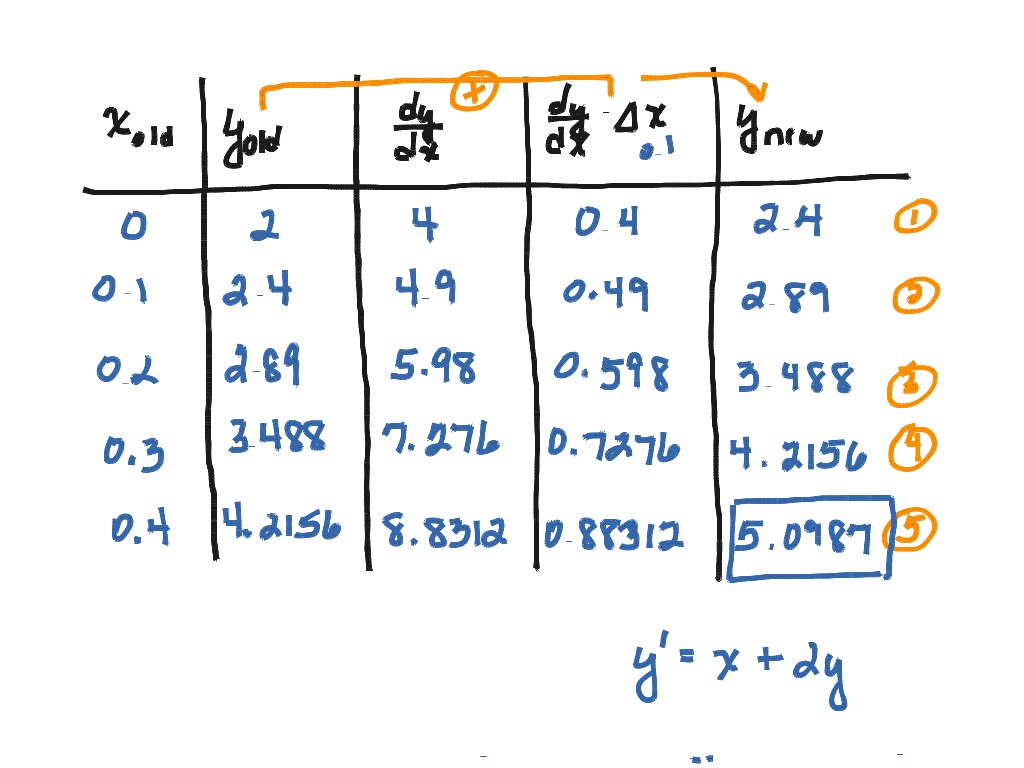
Eulers Method problem Math, Calculus, Application of Differentiation ShowMe
PPT Euler’s Method PowerPoint Presentation, free download ID2857517
Eulers Method
How to do Euler's Method? (Simply Explained in 4 Powerful Examples)
Euler's Method Explained with Examples
I Don't Expect One To Know The Proof Of Every Dependent Theorem Of A Given.
The Function Φ(N) Φ (N) Calculates The Number Of Positive Integers K ⩽ N , Gcd(K, N) = 1 K ⩽ N , Gcd (K, N) = 1.
I Know Why Euler Angles Suffer From Gimbal Lock (With The Help Of A Physical Gimbal/Gyro Model), But I Read From Various Sources (1,2) That Rotation Matrices Do Not.
Related Post: